Ик дистанционное управление. Модули мастер кит с инфракрасным управлением
Инфракрасный пульт дистанционного управления — один из самых простых способов взаимодействия с электронными приборами. Так, практически в каждом доме есть несколько таких устройств: телевизор, музыкальный центр, видеоплеер, кондиционер. Но самое интересное применение инфракрасного пульта — дистанционное правление роботом. Собственно, на этом уроке мы попытаемся реализовать такой способ управления с помощью популярного контроллера Ардуино Уно.
1. ИК-пульт
Что нужно для того, чтобы научить робота слушаться инфракрасного (ИК) пульта? Во-первых, нам потребуется сам пульт. Можно использовать обычный пульт от телевизора, а можно приобрести миниатюрный пульт от автомагнитолы. Именно такие пульты часто используются для управления роботами.
На таком пульте есть 10 цифровых кнопок и 11 кнопок для манипуляции с музыкой: громкость, перемотка, play, stop, и т.д. Для наших целей более чем достаточно.
2. ИК-датчик
Во-вторых, для приема сигнала с пульта нам потребуется специальный ИК-датчик. Вообще, мы можем детектировать инфракрасное излучение обычным фотодиодом/фототранзистором, но в отличие от него, наш ИК-датчик воспринимает инфракрасный сигнал только на частоте 38 кГц (иногда 40кГц). Именно такое свойство позволяет датчику игнорировать много посторонних световых шумов от ламп освещения и солнца.
Для этого урока воспользуемся популярным ИК-датчиком VS1838B , который обладает следующими характеристиками:
- несущая частота: 38 кГц;
- напряжение питания: 2,7 — 5,5 В;
- потребляемый ток: 50 мкА.
Можно использовать и другие датчики, например: TSOP4838, TSOP1736, SFH506.
3. Подключение
Датчик имеет три вывода (три ноги). Если посмотреть на датчик со стороны приёмника ИК сигнала, как показано на рисунке,
- то слева будет - выход на контроллер,
- по центру - отрицательный контакт питания (земля),
- и справа - положительный контакт питания (2.7 — 5.5В).
Принципиальная схема подключения

Внешний вид макета

4. Программа
Подключив ИК-датчик будем писать программу для Ардуино Уно. Для этого воспользуемся стандартной библиотекой IRremote , которая предназначена как раз для упрощения работы с приёмом и передачей ИК сигналов. С помощью этой библиотеки будем принимать команды с пульта, и для начала, просто выводить их в окно монитора последовательного порта. Эта программа нам пригодится для того, чтобы понять какой код дает каждая кнопка.
#include "IRremote.h" IRrecv irrecv(2); // указываем вывод, к которому подключен приемник decode_results results; void setup() { Serial.begin(9600); // выставляем скорость COM порта irrecv.enableIRIn(); // запускаем прием } void loop() { if (irrecv.decode(&results)) { // если данные пришли Serial.println(results.value, HEX); // печатаем данные irrecv.resume(); // принимаем следующую команду } }
Загружаем программу на Ардуино. После этого, пробуем получать команды с пульта. Открываем монитор последовательного порта (Ctrl+Shift+M), берём в руки пульт, и направляем его на датчик. Нажимая разные кнопочки, наблюдаем в окне монитора соответствующие этим кнопкам коды.

Проблема с загрузкой программы
В некоторых случаях, при попытке загрузить программу в контроллер, может появиться ошибка:
TDK2 was not declared In his scope
Чтобы ее исправить, достаточно удалить два файла из папки библиотеки. Заходим в проводник. Переходим в папку, где установлено приложение Arduino IDE (скорее всего это «C:\Program Files (x86)\Arduino»). Затем в папку с библиотекой:
…\Arduino\libraries\RobotIRremote
И удаляем файлы: IRremoteTools.cpp и IRremoteTools.h. Затем, перезапускаем Arduino IDE, и снова пробуем загрузить программу на контроллер.
5. Управляем светодиодом с помощью ИК-пульта
Теперь, когда мы знаем, какие коды соответствуют кнопкам пульта, пробуем запрограммировать контроллер на зажигание и гашение светодиода при нажатии на кнопки громкости. Для этого нам потребуется коды (могут отличаться, в зависимости от пульта):
- FFA857 — увеличение громкости;
- FFE01F — уменьшение громкости.
В качестве светодиода, используем встроенный светодиод на выводе №13, так что схема подключения останется прежней. Итак, программа:
#include "IRremote.h" IRrecv irrecv(2); // указываем вывод, к которому подключен приемник decode_results results; void setup() { irrecv.enableIRIn(); // запускаем прием } void loop() { if (irrecv.decode(&results)) { // если данные пришли switch (results.value) { case 0xFFA857: digitalWrite(13, HIGH); break; case 0xFFE01F: digitalWrite(13, LOW); break; } irrecv.resume(); // принимаем следующую команду } }
Загружаем на Ардуино и тестируем. Жмем vol+ — светодиод зажигается. Жмем vol- — гаснет. Теперь, зная как это все работает, можно вместо светодиода управлять двигателями робота, или другими самодельными микроэлектронными устройствами!
Завязка или «Как начинался девайс»
…Когда я пришёл, Виктория сидела на диване, уставившись в телевизор. День выдался тяжёлый, поэтому ей не хотелось ничего делать. Несколько минут мы смотрели какой-то попсовый сериал, потом он закончился, и Вика выключила телевизор. В комнате стало темно. На улице шумел дождь, и от этого казалось, что дома тоже холодно.
Вика поднялась с дивана и принялась, на ощупь, искать выключатель от светильника. Настенный светильник висел, почему-то, не у дивана, а на другой стене и приходилось топать через всю комнату, чтобы зажечь свет. Когда она, наконец, включила его, комната наполнилась тёплым светом лампочки накаливания.
Около меня, на помятой простыне, лежал пульт от телевизора. Нижние кнопки без опознавательных знаков и, скорее всего, не использовались. И тут у меня возникла интересная мысль…
— Вик, а хочешь, я сделаю так, что твой светильник можно будет пультом от ящика включить? Там даже кнопки лишние есть…
Концепция
Наше устройство должно уметь принимать сигнал с ИК-пульта, отличать «свою» кнопку от других, и управлять нагрузкой. Первый и последний пункты простые, как топор. А вот со вторым немного интереснее. Я решил не ограничиваться каким-то конкретным пультом (Почему? – «Не интересно так!»), а сделать систему, которая может работать с разными моделями пультов от разной техники. Лишь бы ИК-приёмник не спасовал, и уверенно ловил сигнал.
Ловить сигнал будем с помощью фотоприёмника . Причем не каждый приёмник подойдёт – несущая частота должна совпадать с частотой пульта. Несущая частота приёмника указана в его маркировке: TSOP17xx – 17 это модель приёмника, а хх – частота в килогерцах. А несущую частоту пульта можно найти в документации или в инете. В принципе, сигнал будет приниматься, даже если частоты не совпадают, но чувствительность будет фиговой – придётся тыкать пультом прямо в приёмник.
Каждая компания, выпускающая бытовую технику, вынуждена соблюдать стандарты при изготовлении «железа». И частоты модуляции у пультов, тоже стандартные. Зато разработчики отрываются на программной части – разнообразие протоколов обмена между пультом и устройством просто поражает. Поэтому, пришлось придумать универсальный алгоритм, которому плевать на протокол обмена. Работает он так:
 |
В памяти устройства хранятся контрольные точки. Для каждой такой точки нужно записать время и состояние выхода с ИК-приёмника – 0 или 1.
При получении сигнала с пульта, МК будет последовательно проверять каждую точку. Если все точки совпали – то это была та самая кнопка, на которую устройство запрограммировали. А если выход с приёмника хотя-бы в одной точке не совпал с шаблоном, то устройство никак не отреагирует.
Впрочем, баги никто не отменял! Возможно, что, сигнал будет отличаться от шаблона, но
в контрольных точках значения будут одинаковые. Получится ложное срабатывание. Казалось-бы – редкостное западло, и бороться с ним пипец сложно! Но на самом деле не всё так плохо (а местами даже хорошо).
Во-первых, у нас ведь цифровой сигнал, а значит, импульсы идут с постоянными задержками (таймингами) и просто-так не возникают. Поэтому, если точки стоят достаточно плотно, то можно не бояться, что какой-нибудь импульс будет пропущен.
Во-вторых мелкий шум (обычно выглядит, как редкие короткие импульсы) в большинстве случаев идёт лесом – ибо если он не попадёт прямо на контрольную точку, то нифига не повлияет на систему. Значит у нас есть естественная защита от шума.
Второй тип ошибок (aka «Пропуск команды») бывает из-за того, что точка расположена слишком близко к фронту импульса (к тому месту, где сигнал на выходе приёмника меняет свой уровень).
Представь себе, что через несколько микросекунд после контрольной точки сигнал должен меняться с HIGH на LOW. А теперь представь, что пульт выдал команду чуть быстрее, чем обычно (довольно часто случается). Фронт импульса сдвинулся во времени, и теперь он происходит ДО контрольной точки! Выход с приёмника не совпадёт с шаблоном и система сбросится.
Чтобы этого не происходило, нужно размещать контрольные точки подальше от фронтов.
«Всё круто» — скажешь ты – «Но откуда мне взять контрольные точки?». Вот и я над этим долго тупил. В результате решил доверить расстановку точек тебе.
На устройстве есть джампер J1. Если при включении он замкнут – устройство будет тупо передавать через UART всё, что выдаёт ИК-приёмник. На другой стороне провода эти данные принимает моя программа, которая выдаёт на экран компа импульсы с TSOP’а. Тебе остаётся только мышкой раскидать по этому графику контрольные точки, и прошить их в EEPROM. Если возможности использовать UART нету, то на помощь приходит джампер J2. Когда он замкнут – устройство не выдаёт данные по UART, а складывает их в EEPROM.
 |
Схема
Простая до безобразия. В качестве контроллера я взял ATTiny2313. Частота 4 мегагерца, от кварца, или внутренней RC цепочки.
На отдельный разъём выведены линии RX и TX для связи, и питание. Туда – же выведен RESET для того чтобы можно было перепрошивать МК, не вынимая из устройства.
Выход фотоприёмника подключается к INT0, он подтянут к питанию через резистор в 33к. Если будут сильные помехи, то можно поставить туда резистор поменьше, например, 10к.
На пинах D4 и D5 висят джамперы. Jumper1 на D5 и Jumper2 на D4.
К пину D6 подцеплен силовой модуль. Причём симистор я взял самый мелкий из тех, что у меня были – BT131. Ток у него 1А – не круто, но зато корпус не слишком большой — ТО92. Для мелкой нагрузки самое то. Опторазвязку я сделал на MOC3023 – у неё нет датчика пересечения нуля, а значит она подходит для плавного управления нагрузкой (здесь я это так и не реализовал).
Порт B почти полностью выведен на разъём – туда можно прицепить индикатор или ещё что-нибудь. Этим-же разъёмом я пользуюсь при прошивке девайса. Пин B0 занят светодиодом.
Питается всё это дело через LM70L05 и диодный мост. То есть на вход можно подавать переменное напряжение, например, с трансформатора. Главное, чтобы оно не превышало 25 Вольт, а то умрёт либо стабилизатор, либо кондер.
Плата получилась вот такая:
 |
 |
Да, она немного отличается от той платы, которая лежит в архиве. Но это не значит, что я сделал себе убер-продвинутую плату, а вам подсунул демо версию:). Напротив, моя плата имеет пару недостатков, которых нет в конечной версии: у меня не выведена на штырёк ножка RESET, и светодиод висит на PB7. А это не очень способствует внутрисхемному программированию.
Прошивка
Устройство может работать в двух режимах. В первом – когда J2 замкнут – оно просто передаёт импульсы с фотоприёмника в UART. С него и начнём:
UART работает на скорости 9600, т.е, при частоте 4МГц в регистр UBRR записываем 25.
…ждём, пока не дёрнется ножка фотоприёмника. Как только она опустилась (изначально-то она болтается на pull-up резисторе) мы запускаем таймер (TIMER/COUNTER1, тот, что на 16 бит) и врубаем прерывание INT0 на любое изменение входа – any logical change (ICS00 = 1). Таймер тикает… ждём.
Импульс с пульта кончился – выход с фотоприёмника взметнулся вверх, прерывание сработало. Теперь записываем в память значение таймера и сбрасываем таймер. Ещё нужно инкрементировать указатель записи, чтобы в следующем прерывании записать в другую ячейку памяти.
Ещё импульс… выход дёргается… прерывание… запись значения таймера в память… сброс таймера… указатель + 2 (мы пишем два байта за раз)…
И так будет продолжаться до тех пор, пока не станет ясно, что конец (оперативки) близок. Или, пока сигнал не кончится. В любом случае, мы стопорим таймер и отключаем прерывания. Потом, не спеша выкидываем всё, что насобирали, в UART. Или, если J2 замкнут – в EEPROM.
В конце можно затупить в бесконечный цикл и ждать ресета – миссия выполнена.
А на выходе получится последовательность чисел. Каждое из них – время между изменениями состояния выхода TSOP’a. Зная, с чего началась эта последовательность (А мы знаем! Это перепад с HIGH на LOW), мы можем восстановить всю картину:
После инициализации сидим и ждём, пока TSOP дёрнется. Как только это случилось – читаем из EEPROM первую точку, и в простом цикле тупим столько, сколько там написано. При этом время считаем пачками по 32us. Выйдя из ступора, проверяем – что-там на выходе приёмника.
Если выход не совпал с тем, что мы ожидали – это не наша команда. Можно спокойно дожидаться конца сигнала и начинать всё сначала.
Если выход соответствует нашим ожиданиям – загружаем следующюю точку и проверяем её. Так до тех пор, пока не наткнёмся на точку, время которой = 0. Это значит, что точек больше нет. Значит вся команда совпала, и можно дёргать нагрузку.
Вот так, получается, простенький алгоритм. Но ведь чем проще, тем надёжнее!
Софтина
Сначала я думал сделать автоматическое запоминание шаблона. То есть ты замыкаешь джампер, тыкаешь пультом в TSOP, а МК сам расставляет контрольные точки и складывает их в EEPROM. Потом стало ясно, что идея бредовая: более-менее адекватный алгоритм получится чересчур сложным. Или не будет универсальным.
Второй идеей была программка для компа, в которой можно самому расставить контрольные точки. Не слишком технологично, но всяко лучше, чем доверять это дело МК.
 |
Приучаем девайс отзываться на нужную кнопку пульта:
1) Замыкаем перемычку J1.
2) Подключаем UART. Если возможности его подключить нету, то замыкаем джампер J2. Тогда устройство будет скидывать данные в EEPROM.
3) Врубаем питание.
4) Если мы решили юзать UART, то запускаем софт и смотрим на строку состояния (внизу окошка). Там должно быть написано “COM порт открыт”. Если не написано, то ищем косяк в подключении и тыкаем кнопу «Подключить».
5) Берём пульт и тыкаем нужной кнопкой в TSOP. Как только девайс почует, что сигнал пошёл – загорится светодиод. Сразу после этого устройство начнёт передавать по UART (или писать в EEPROM) данные. Когда передача закончилась, светодиод гаснет.
6.1) Если работаем по UART, то жмём кнопу «Загрузить по UART». И радуемся надписи «Загрузил график…» в строке состояния.
6.2) Если работаем через EEPROM, то читаем программатором EEPROM память и сохраняем в *.bin файл. (Именно bin!). Потом нажимаем в программе кнопку «Загрузить.bin» и выбираем файл с EEPROM.
7) Смотрим на загрузившийся график – это сигнал с TSOP’a. На боковой панели есть ползунок – им можно менять масштаб. Теперь тыкаем мышкой по графику – ставим контрольные точки. Правой кнопкой точки удаляются. Только не нужно их ставить слишком близко к фронтам. Получается примерно так:
 |
8) Нажимаем «Сохранить.bin» и сохраняем точки. Потом прошиваем этот файл в EEPROM. Так-как мы запихиваем время между двумя точками в 7 бит, то оно ограничено 4мс. Если время между двумя точками превысит это значение – программа откажется запихивать точки в файл.
9) Снимаем джамперы. Перезагружаем устройство. Готово!
Видео с испытаний
Помните, как в мультфильме «трое из Простоквашино», мама дяди Федора сказала: «Я так устаю на работе, что даже телевизор смотреть не могу!» Видимо, эта фраза и является ответом на вопрос, почему вся современная бытовая аппаратура имеет инфракрасные пульты дистанционного управления (ПДУ) . Но, если разобраться, то все началось намного раньше.
ПДУ с проводами
Первыми работами по дистанционному управлению занимались немцы в конце 30-х годов двадцатого столетия, еще до начала Второй мировой войны. Объектом автоматизации был ламповый приемник. Пульт управления представлял собой отдельную металлическую панель с кнопками. Нажатие кнопки приводило к срабатыванию исполнительного механизма, - реле, электромагнита или двигателя. Соединение между таким ПДУ и приемником было выполнено многожильным кабелем, что все равно привязывало слушателя к определенному месту.
Подобные пульты были у советских ламповых телевизоров первого класса. Это была маленькая пластмассовая коробочка с регулятором громкости, соединенная с телевизором проводом. Кроме громкости такой пульт ничем управлять не мог. Но определенные удобства такой пульт, несомненно, создавал. Ведь тогда не было надоедливой рекламы и фильм приходилось смотреть от начала до конца.
Ультразвуковые ПДУ
Первый беспроводной пульт дистанционного управления обязан своим появлением на свет американцу Хассо Платтнеру. В 1972 году после ухода из IBM он организовал свою фирму и в целях налаживания деловых контактов и связей часто и много ездил по всему миру. На одной из встреч с руководством компании JVC произошел конфузный случай.
При обсуждении какой-то проблемы Платтнер встал и двинулся к телевизору, чтобы пальцем показать какую-то деталь на экране. Но, до экрана не дошел, споткнувшись о кабель дистанционного управления. Пролил коктейль на костюм и в сердцах сказал: «Разве нельзя было сделать переключение каналов по радиоволне?», чем вогнал японских компаньонов в краску. А уже ровно через год появился первый пульт на ультразвуковых лучах.
Принцип его действия заключался в подаче своей частоты при нажатии на каждую кнопку. Ультразвук улавливался микрофоном и усиливался усилителем, в которым использовалось несколько параллельных каналов с резонансными контурами. На выходах этих каналов появлялись управляющие напряжения. При таком способе кодирования каналов получалось не очень много.
Дальнейшее развитие электроники, в частности появление микросхем фирмы INTEL, позволило отказаться от подобного многочастотного кодирования. На одной ультразвуковой частоте за счет различных способов модуляции стало возможным передавать намного больше команд, чем при много частотном кодировании. Одним из первых аппаратов оснащенных ультразвуковым ПДУ был телевизор фирмы RCA. Кодирование команд осуществлялось при помощи широтно-импульсной модуляции (ШИМ).
Эти пульты имели целый ряд недостатков. В первую очередь большие габариты и мощность потребления. Это было связано с тем, что ультразвуковое излучение охотно поглощается предметами обихода, - одеждой, мягкой мебелью, коврами. Поэтому мощность излучения требовалось увеличивать, что сокращало срок службы батарей.



Рис. 1. Первые пульты дистанционного управления
Специализированные микросхемы для ПДУ
Дело пошло лучше после того, как фирма INTEL разработала свой первый микропроцессор 8080. Эту новую разработку взяли за основу фирмы GRUNDIG и MAGNAVOX, которые сделали первый специализированный микропроцессор. В этом случае процессором генерируется нужный код цифровой команды под воздействием нажатой кнопки. Таким образом специализированная микросхема для ПДУ есть не что иное, как с уже прошитой программой. Такие ПДУ назывались TELEPILOT.
ПДУ на ИК-лучах
Первый цветной телевизор с микропроцессорным управлением и пультом дистанционного управления (ПДУ) на ИК лучах был выпущен совместно фирмами GRUNDIG и MAGNAVOX уже в 1974 году. Уже в этой модели в углу экрана показывался номер переключающегося канала (система OSD). Эта система команд получила название ITT. Это был первенец фирмы GRUNDIG.
В дальнейшем исследованиями в области ПДУ занялась фирма PHILIPS, которая разработала систему команд RC-5. Новая система позволяла кодировать 2048 команд, что в 4 раза превысило количество команд в системе ITT. Несущая частота была выбрана 36КГц, что не мешало передачам европейских радиовещательных станций и работе пультов с ультразвуковыми передатчиками с частотой 30 и 40КГц, а также обеспечивала достаточную дальность приема.
Но электронная техника не стояла на месте, а как говорил один киногерой, - шла вперед семимильными шагами. Совершенствовались телевизоры, появились видеомагнитофоны и музыкальные центры, спутниковые тюнеры, проигрыватели CD и DVD и многое другое.
Для управления новой техникой потребовались и новые ПДУ, а соответственно пришлось разрабатывать новые микросхемы. Такие микросхемы разработали фирмы SIEMENS и THOMSON. Несущая частота новых ПДУ была тоже 36КГц, но использовался другой метод модуляции сигнала, - двухфазная модуляция. При такой модуляции несущая частота была более стабильна, что обеспечило повышение дальности, увеличение помехозащищенности и надежности работы.
Дальнейший вклад в дело развития систем ПДУ снова внесла фирма PHILIPS. В начале 90 годов прошлого века она объединила все лучшее, что было в системах RC-5 и SIEMENS. Получившийся продукт получил название «Объединенная система команд». Суть ее в следующем. ПДУ такой системы имеют функции «MENU 1» и «MENU 2». В каждой из этих функций одна и та же кнопка выполняет разные команды, и получается, что меньшим количеством кнопок можно выполнить большее число команд.
Впоследствии пульты управления проникли во многие другие области бытовой техники. ИК излучением в настоящее время управляются кондиционеры, вентиляторы, настенные тепловентиляторы, . Даже некоторые модели автомагнитол и цифровых фотоаппаратов имеют ПДУ.
При всем многообразии пультов и управляемых ими устройств, все они работают практически одинаково: инфракрасный светодиод ПДУ при нажатии кнопок излучает пачки инфракрасных импульсов (вспышек), которые принимаются фотоприемником («глазом») телевизора или другого устройства. Современный интегральный фотоприемник представляет собой устройство достаточно сложное, хотя по внешнему его виду этого не скажешь. Внешний вид фотоприемника показан на рисунке 2.

Рисунок 2. Фотоприемник
Приемник настроен на прием импульсов с несущей частотой 36КГц, что соответствует протоколу RC-5. Если вблизи фотоприемника просто включить, например, от батарейки, ИК светодиод, то его немигающее свечение на «глаз» никакого воздействия не окажет, даже если этот светодиод поднести вплотную к фотоприемнику. Также не оказывает воздействия дневной и искусственный свет. Такая избирательность обусловлена тем, что в цепи усиления сигнала фотоприемника имеется полосовой фильтр. Структурная схема фотоприемника показана на рисунке 3.
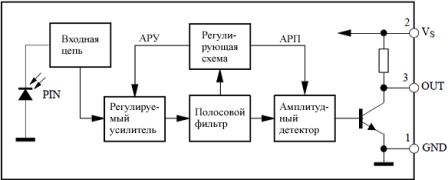
Рисунок 3. Структурная схема фотоприемника
Здесь не будет объясняться подробно протокол RC-5, поскольку на дальнейший рассказ, да собственно и на ремонт ПДУ, это незнание никак не повлияет. Желающие познакомиться с протоколом RC-5 более подробно могут найти его описание в интернете. Это уже тема для отдельной статьи.
Устройство ПДУ
При всем многообразии современных ПДУ все модели устроены практически одинаково. Основное различие чаще всего во внешнем виде, в дизайне устройства. Как было сказано в первой части статьи, основой современного ПДУ является специализированный микроконтроллер. Программа в МК записывается в процессе изготовления на заводе и в дальнейшем изменена быть не может. При включении в схему для такого МК требуется минимальное количество навесных деталей. Схема современного ПДУ показана на рисунке 4.
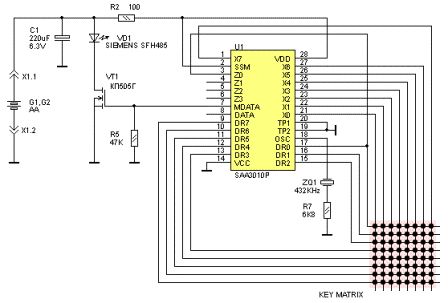
Рисунок 4. Схема современного пульта дистанционного управления
Основой всего устройства является микросхема U1типа SAA3010P. Хотя буквы могут быть и другими, что говорит о другой фирме производителе микросхемы. Но цифры все равно остаются 3010.
Как было сказано выше, навесных деталей практически нет. Прежде всего, это , хотя это не совсем точно. Его назначение - синхронизация внутреннего генератора микросхемы, что обеспечивает требуемые временные характеристики выходного сигнала.
В нижнем правом углу схемы показана матрица клавиш (KEY MATRIX). Ее строки подсоединены к выводам DR0…DR7, а столбцы, соответственно, к выводам X0…X7. При нажатии на любую кнопку замыкается одна пара столбец - строка, и на выходе микросхемы возникает импульсная последовательность соответствующая нажатой кнопке. Каждая кнопка выдает свою последовательность и никакую другую! Всего возможно подключить 8*8=64 кнопки, хотя практически может быть и меньше.
Выходной сигнал в виде импульсов напряжения поступает на затвор полевого транзистора VT1, который в свою очередь управляет работой ИК светодиода VD1. Алгоритм управления в данном случае очень простой: открылся транзистор - засветился светодиод, транзистор закрыт, - светодиод погас. В таком случае говорят, что транзистор работает в ключевом режиме. В результате таких вспышек формируются пакеты импульсов, соответствующие протоколу управления RC-5.
Питание схемы производится от двух гальванических элементов типа AA, энергии которых хватает не менее чем на год. Параллельно батарейкам стоит электролитический конденсатор C1, который шунтируя внутренне сопротивление батареек, продлевает срок их службы и обеспечивает нормальную работу ПДУ при несколько «подсевших» батарейках. Светодиод в импульсном режиме может потреблять ток до 1А.
После рассмотрения схемы ПДУ, кажется, можно сказать, что ломаться при таком простом устройстве абсолютно нечему, но это не так. Именно ПДУ чаще всего доставляет неприятности владельцу телевизора. О том, как отремонтировать ПДУ, какие его основные «болезни», а также, чем и как их вылечить будет рассказано во второй части статьи.
История дистанционного управления
Один из самых ранних образцов устройств для дистанционного управления придумал и запатентовал Никола Тесла в 1893 году .
Первый пульт ДУ для управления телевизором был разработан американской компанией Zenith Radio Corporation в начала 1950-х . Он был соединён с телевизором кабелем . В 1955 году был разработан беспроводной пульт Flashmatic , основанный на посылании луча света в направлении фотоэлемента . К сожалению, фотоэлемент не мог отличить свет из пульта от света из других источников. Кроме того, требовалось направлять пульт точно на приёмник.

Пульт ДУ Zenith Space Commander 600
Универсальный пульт Harmony 670
Военное дело
- В Первой мировой войне немецкий флот применял специальные лодки для борьбы с прибрежным флотом. Они приводились в движение двигателями внутреннего сгорания и управлялись дистанционно с береговой станции
по кабелю длиной несколько миль, привязанному к катушке на корабле. Самолёт использовался для их точного наведения. Эти лодки несли большой заряд взрывчатки в носу и ходили на скорости 30 узлов .
- Рабоче-крестьянская Красная армия использовала дистанционно-управляемые танки в Советско-финской войне 1939-1940 годов и в начале Великой Отечественной войны . Телетанк управлялся по радиосвязи из управляющего танка на расстоянии 500-1500 м, таким образом, получалась телемеханическая группа. Красная армия выставила по меньшей мере два телетанковых батальона в начале ВОВ. Также у Красной армии были дистанционно-управляемые катера и экспериментальные самолёты. Между тем, немецкие танковые батальоны были полностью радиофицированы, каждый танк имел на своем борту рацию, что говорит об огромном превосходстве немецкой техники и промышленности к началу войны.
- Подробная информация о применении ПДУ для средств спецназначения в наше время носит преимущественно закрытый характер
Авиация
Практически все средства авионики и другое бортовое оборудование ЛА управляются с помощью пультов ДУ в кабине пилотов, ДУ имеется также в наземном оборудовании
Водный транспорт
Значительная часть судового оборудования управляется с помощью ПДУ
Железная дорога и метро
ПДУ применяются для управления оборудованием поездов, путевым оборудованием, оборудованием станций (эскалатор, освещение и т. д.)
Промышленное производство и строительство
Некоторые виды производственного и строительного оборудования могут управляться с помощью ПДУ
Научно-исследовательские и производственно технические лаборатории
Некоторые виды лабораторного оборудования управляются с помощью ПДУ
Космос
- Технология дистанционного управления также использовалась в исследованиях космоса. Советский Луноход дистанционно управлялся с Земли. Прямое дистанционное управление космическими аппаратами на бо́льших расстояниях непрактично из-за возрастающей задержки сигнала.
- Для управления оборудованием и двигателями космического корабля в кабине космонавтов имеются пульты ДУ
Связь и другие системы информационных технологий
Дистанционное управление могут иметь ретрансляторы, радиомаяки, а также связные радиостанции, радиолокаторы и другие системы
Электроэнергетика
В электроэнергетике ПДУ используются для управления объектами энергосистемы и управления энергопотреблением
был сделан модуль управления роботом по ИК каналу. Вот о нём я бы и хотел написать поподробнее. Так как применений этому можно найти очень много.
Собственно, что такое ИК-управление - объяснять, думаю, не нужно. Сейчас более распространено управление по Wi-Fi, Bluetooth, ZigBee. Но если вам требуется простое устройство, которое можно собрать «на коленке» при минимальных затратах, то эта статья для вас. =)
Я не буду привязывать эту статью к определённому микроконтроллеру, а опишу общие принципы работы ИК прёмо-передатчика с AVR МК.
1. Что потребуется
При создании простого ИК-управления, негласным стандартом является использование приёмника от компании Vishay TSOPxxxx и диода TSALxxxx в качестве передатчика.В обозначении приёмников TSOP последние две цифры означают частоту (в кГц) на которой воспринимается передаваемый сигнал. Сложностей в работе с этими компонентами особых нет. Можно писать свой протокол передачи, можно воспользоваться уже готовыми решениями. В моём случае я решил связать два микроконтроллера ИК-каналом, используя USART. Принцип такой же, как если бы мы соеденили два МК обычными проводами. Нюанс только в модулировании несущей частоты и в настройке таймера.
2. Схемки
Чтобы не городить огородов, воспользуемся схемой включения TSOP из его даташита:Выход TSOPа нужно подключить напрямую к входу (RX) USART МК.
С подключением передатчика ситуация немного другая. Так как приёмник работает только на определённой частоте, то нужно задать эту же частоту на излучателе. Это сделать не сложно запрограммировав таймер. Для ATmega16 это будет выглядить вот так:
TCCR1A=0x40;
TCCR1B=0x09;
OCR1AH=0x00;
OCR1AL=0x84;
Нужную частоту можно выразить из формулы:
OCRn - будет искомое значение, которое нужно перевести в шестнадцатеричный формат и записать в регистр OCR1A (для случая с МК ATmega16).
Теперь TSOP будет принимать наш сигнал. Но чтобы можно было использовать USART, нужно промодулировать наш сигнал. Чтобы это можно было делать - подключим ИК-диод по схеме:
3. Немного кода
Прошивки я писал в CodeVision AVR.Вот так будет выглядеть код для передатчика:
#include
#include
Void main(void)
{
PORTB=0x00;
DDRB=0x02;
DDRC=0x00;
PORTC=0xFF;
TCCR1A=0x40;
TCCR1B=0x09;
OCR1AH=0x00;
OCR1AL=0x84; // Сюда вписываем значение для вашей частоты
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Mode: Asynchronous
// USART Baud Rate: 2400
UCSRA=0x00;
UCSRB=0x08;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0xCF;
While (1)
{
If (PINC.4 == 0x00) { putchar("S");}/* В данном случае при нажатии на кнопку, которая висит на PINC.4 МК отсылает символ "S". Который передаётся на другой контроллер через ИК.*/
};
}
Код приёмника не привожу, т.к. занимает много места, а для восприятия общих принципов кода передатчика будет, думаю, достаточно.
Помимо дистанционного управления (хотя это и так обширная область применений), можно использовать этот метод для датчиков припятствий\прохождения объектва и если таковых датчиков у вас много, а работаю они на одной частоте, то чтобы они не засвечивали друг друга можно передавать разные пакеты.
Желаю удачи! Буду рад любым вопроса\критике\предложениям;)
UPD.
Решил выложить фото самого пульта, чтобы было видно, что работает девайс не только как китайские приёмники, которые подключаются к ПК. Возможности гораздо шире и универсальнее.